2025 and Beyond:
Re-defining People-Vehicle Interaction and Infrastructure for Future Mobility in Singapore
TUM Asia has been awarded a 2-year project under the LTA-URA Urban Mobility Grand Challenge to research the current and future design of Bus Stops, Taxi Stands and Pick-Up/Drop-Off points. The main goal of the project is to prepare these passenger pick-up/drop-off facilities (PUDOs) for the upcoming deployment of Autonomous Vehicles (AVs) and improve mobility experiences for all users. The research project is led by TUM Asia in partnership with the National University of Singapore, the Nanyang Technological University and ST Engineering Autonomous Solutions. Motional Singapore Pte. Ltd., an autonomous vehicle (robotaxi) research and development company, and public bus operators SBS Transit and Tower Transit are also collaborating in the project to ensure relevant outcomes for all stakeholders.
In Singapore, we have standardised design specifications for bus stops, but they are not set up for receiving AVs yet. Other transport facilities such as pick-up/drop-off points and taxi stands do not have unified design specifications. To ensure the smooth deployment of AVs, revised and consistent design standards for all PUDO types will be necessary. Most PUDO facilities are complex environments, especially at peak hours. There can be many vehicles and passengers intermingling, waiting for, finding, alighting, and boarding buses, taxis, and private vehicles. Such inadequacies could impede the AVs’ ability to safely navigate in PUDOs and create conflicts in traffic and commuter flows and interactions between pedestrians, human-driven vehicles, and AVs.
As the first physical interface between passengers and the transport system, the pick-up/drop-off facility plays a major role in how people access future mobility services. The transition is critical for ensuring safe integration of AVs with human-driven vehicles, a smooth learning curve for other road users and pedestrians, and minimal or positive impacts on traffic flows. To address the identified problems, our project consists of three main objectives:
Determine the impacts of AV deployment on traffic demand and throughput at PUDOs
Propose new design and retrofitting concepts to future-proof and improve the user experience at PUDOs
Evaluate and validate the proposed design and retrofitting concepts
We exercise a holistic, design-led, iterative strategy that synergises Design, Traffic Engineering, Sensing Technology and Prototyping. Our approach is closely supported by continuous user research, real-time contextual and operational data, and traffic simulations. Iterative prototyping and progressive testing lead to the final on-site pilot test and eventually, practical design recommendations and innovative ideas for future PUDOs. Infrastructure and human-machine interface elements are combined in one integrated concept to improve information dissemination and passenger/pedestrian and traffic flow in a mixed traffic environment with autonomous and human-driven traffic.
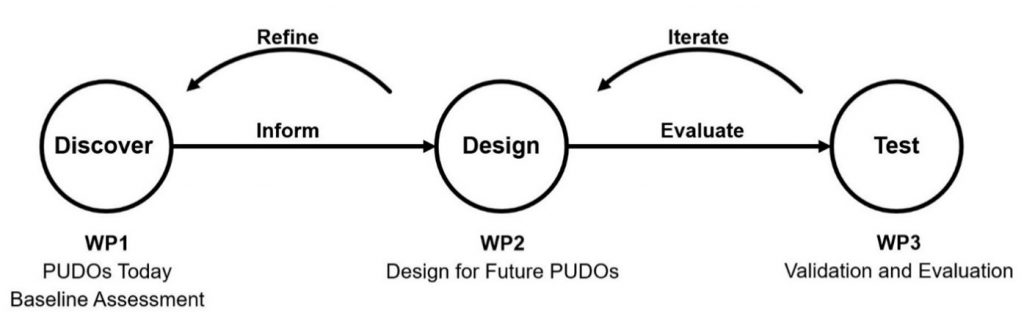
The project is divided into three main work packages (WP) with sub-work packages covering specific Focus Area objectives. WP1 lays the foundation for the project and discovers the present context of PUDOs with the collection of baseline data and research into human interactions and behaviour in transport environments. Armed with an understanding of the gaps, challenges, and pain points at the various sites, WP2 then builds on the outcomes and insights from WP1 to explore and develop solutions for future PUDOs designs in an iterative process. In WP3, the impacts of AV activity on people and traffic flows as well as their interactions are evaluated to validate the proposed design recommendations in pilot tests at selected locations with different types of AVs (Figure 1).
TUM Asia does not offer on-campus hostels for international students. However, if you are enrolled in one of our joint programmes, you may have the option to ballot for rooms at NTU or NUS. Many international students prefer to find private accommodation, giving them the flexibility to choose a place that best suits their budget and living preferences.
Once you’ve accepted your offer to join TUM Asia, we’ll provide a helpful list of suggested hostels to get you started. Please note that these hostels are independent and not affiliated with TUM Asia, and arranging accommodation will be your responsibility. We strongly recommend securing your housing early, as options that are both affordable and convenient can be in high demand.